Computer Graphics Rendering





Project notes
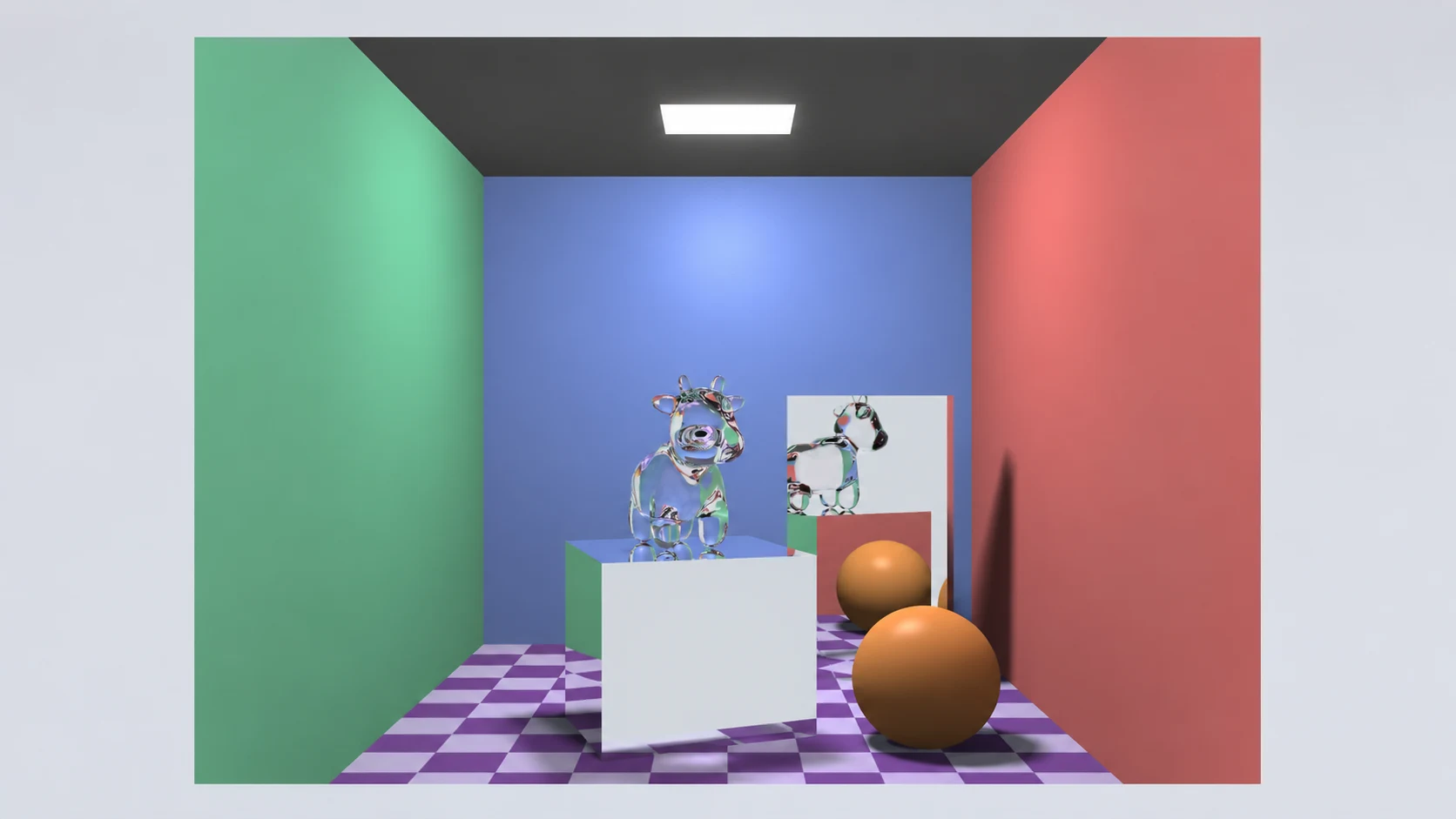
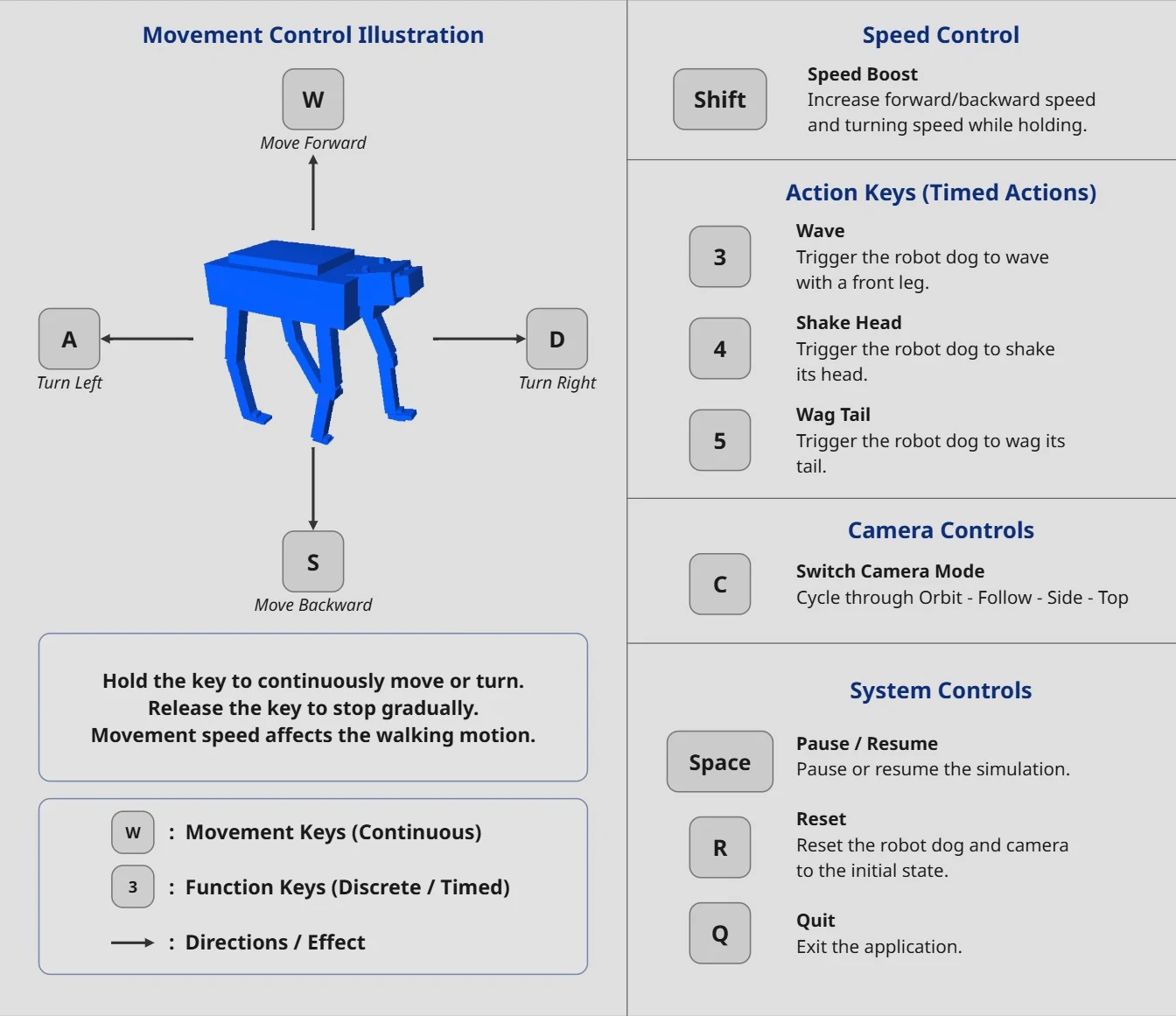
Unitree Robot Dog and Seeing is Not Necessarily Believing are two computer graphics projects I worked on, focusing respectively on real-time character animation and photorealistic rendering. Unitree Robot Dog uses C++ to build a hierarchical quadruped robot model with procedural gait, joint phase control and keyboard interaction, allowing the character to walk, turn and trigger actions in real time. Seeing is Not Necessarily Believing centres on a realistic living-room scene with chess pieces and a floor mirror, using a custom Monte Carlo path tracer, BVH acceleration, material and lighting control, and mirror-visibility rules to create the illusion that the reflection does not match reality. Seeing is Not Necessarily Believing received a silver award and ranked second among 40 groups in the 2026 ANU Rendering Competition. This collection also includes additional computer graphics rendering studies shown in images 5 and 6.